PRZYRZĄD DO SPRAWDZANIA
PRAWA SKŁADANIA PRĘDKOŚCI I
BADANIA RUCHU WZGLĘDNEGO
Przyrząd jest przeznaczony do badania
własności ruchu jednostajnego złożonego, powstałego w wyniku
składania dwóch ruchów jednostajnych. Za pomocą przyrządu można
wyznaczyć wypadkową prędkości o równoległych łub
nachylonych do siebie pod kątem kierunkach.
Przyrząd składa się z następujących części: I.
Wózek z przesuwanym suwakiem oraz wskazówkami do składania
prędkości ruchów o
kierunkach równoległych. II.
Komplet liniałów i uchwytów do składania prędkości o nierówno-
ległych kierunkach.
III. Zespół
napędowy z silnikiem zasilanym prądem zmiennym 220 V. Wszystkie wymienione zespoły
są umieszczone we
wspólnym pudełku 7.
przegródkami.
Wózek do składania
prędkości ruchów o kierunkach równoległych
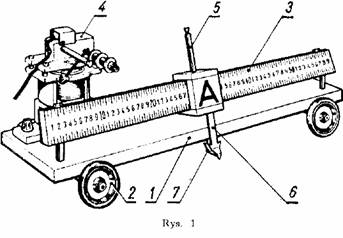
Prostokątna, drewniana płytka (l) jest umieszczona na czterech kółkach (2) z gumowymi oponami. Na wózku jest umocowana linijka (3) z podziałką milimetrową oraz silnik (4). Po linijce przesuwa się suwak z literą „A" i uchwytem (5) do połączenia suwaka z silnikiem i statywem stołowym. Wskazówka (6) przymocowana do suwaka oraz wskazówka (7) połączona na stałe z płytką wózka służą do określania wielkości przemieszczeń w czasie ruchu przyrządu.
Komplet liniałów do składania prędkości ruchów o kierunkach
nie równoległych
W skład kompletu wchodzą
linie z podziałkami milimetrowymi dobudowy boków oraz przekątnych
równo legło boków prędkości.
Odpowiednie urządzenia uchwytowe umożliwiają połączenie ze sobą poszczególnych linii i umocowanie ich na statywach w płaszczyźnie pionowej.
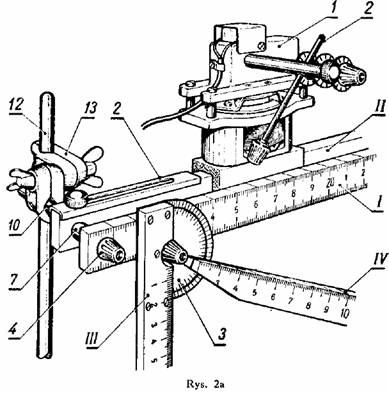
Sposób montowania układu liniałów i umieszczenia na nim silnika do ćwiczeń jest przedstawiony na rys. 2a, 2b, 2c.
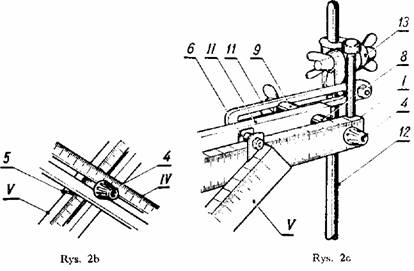
Liniał poziomy (I), listwę II z silnikiem (1) i ogranicznikiem ruchu silnika (2), liniał pionowy III z kątomierzem (3) i liniały przekątne IV i V łączymy nakrętkami (4) za pośrednictwem nasuwek (5 i 6) nasuwanych tulejek (7 i 8) i krótkich metalowych prętów (9 i 10). Pręty krótkie bezpośrednio lub za pośrednictwem regulowanego uchwytu (11) mocuje się na prętach statywowych (12) uchwytami 2-szczękowymi (13).
Statywy przykręcamy do stołu uchwytami stołowymi.
Zespół napędowy z silnikiem 220 V
Silnik (rys. 3) zasilany sieciowym prądem zmiennym o napięciu 220 V mocuje się na wózku. Służy do tego podstawka - nasuwka (1) mająca w dolnej części dwa wycięcia (2), przez które przykręca się do płytki wózka śruby mocujące.
Silnik przesuwa się również na listwie. Umożliwia to ta sama nasuwka mająca wycięcie (3) dostosowane do prostokątnego przekroju
listwy.
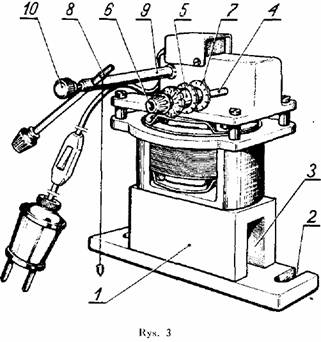
Rozmieszczenie ruchomych części przyrządu odbywa się za pośrednictwem nici nawijanych na obracające się rolki. Na osi silnika (4) osadza się podwójną rolkę (5) o jednakowych średnicach lub rolkę o średnicach niejednakowych. Po nasunięciu rolkę należy zabezpieczyć przed spadaniem nakręcając radełkowaną nakrętkę (6). Rolki wprawia się w powolny ruch obrotowy za pośrednictwem przekładni ślimakowej (umieszczonej wewnątrz obudowy silnika). Na rolki nawija się nici zaczepione w odpowiednio wykonanych rowkach (7). Prędkości nawijania się (przesuwu) nici są różne i zależą od średnicy rolek. Im większa średnica tym większa prędkość nawijania.
Przesuwanie się silnika obserwujemy za pośrednictwem metalowego pionu, który można zawiesić na pręcie (8) wsuwanym w otwór meta
lowego kołka (9) przymocowanego do obudowy silnika. Pręt z pionem mocujemy dokręcając radełkowaną śrubę (10).
Nić z pionem można również zawiesić bezpośrednio na obracających się rolkach zespołu napędowego.
Składanie prędkości ruchów o kierunkach równoległych
Prędkości dwóch ruchów o przemieszczeniach w kierunkach do siebie równoległych składamy zgodnie z zasadą dodawania wektorów równoległych. Wektory prędkości o zwrocie zgodnym ze zwrotem osi liczbowej umownie przyjmujemy za dodatnie, a przeciwnym do zwrotu osi liczbowej za ujemne.
Wózek z suwakiem i silnikiem ustawiamy na
poziomej płaszczyźnie (stoliku szkolnym) np.
po lewej stronie, a po przeciwnej, np. po prawej pręt z haczykiem umocowany w statywie przykręconym do stołu
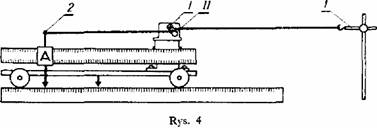
Składanie ruchów o prędkościach zgodnie zwróconych jest przedstawione schematycznie na rys. 4. Suwak powinien być umieszczony po lewej stronie wózka, a silnik po prawej. Rolkę I bliższą obudowy silnika łączymy nicią z uchwytem (1) statywu. Rolkę II zaś należy połączyć z uchwytem (2) suwaka. Nici muszą być nawinięte w kierunku przeciwnym do kierunku obrotu rolek. Na stoliku w pobliżu strzałek układamy linię z podziałką milimetrową.
Prędkość składową (V1) wózka wyznaczamy obserwując przesuwanie strzałki czarnej wzdłuż listwy położonej na stole (wzór 1).

Prędkość składową (V2) określamy obserwując przesunięcie suwaka na listwie wózka (wzór 2)
S V2=S/t . . . (2) gdzie: S2 — droga suwaka na listwie
- t — czas, w jakim ta droga została
przebyta V2 — prędkość suwaka na listwie
Prędkością wypadkową (V) jest prędkość przesuwania się strzałki czerwonej wzdłuż położonej na stole linii z podziałką milimetrową (wzór 3).
V =S/t ... (3) gdzie: S — droga strzałki suwaka na linii
t — czas, w jakim ta droga została przebyta V wypadkowa prędkość wózka i suwaka
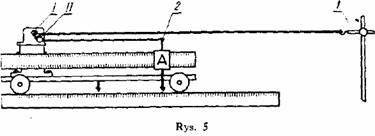
Ustawienie wózka przy składaniu ruchów o kierunkach prędkości przeciwnie zwróconych obrazuje w sposób schematyczny rys. 5. Suwak powinien być umieszczony po prawej stronie wózka, a silnik po lewej. Rolkę I bliższą obudowy silnika łączymy nicią z uchwytem (1) statywu, a rolkę II 7. uchwytem (2) suwaka. Prędkości wyznaczamy w sposób analogiczny do opisanego poprzednio.
Rozpatrując składanie ruchów z punktu widzenia teorii względności ruchu, możemy na podstawie wyżej wymienionych ćwiczeń i pomiarów łatwo wyprowadzić wniosek, że pojęcie ruchu jest względne i związane ściśle z tzw. układem odniesienia. Np. to samo ciało znajdujące się w ruchu względem jednego układu może być równocześnie w stanie spoczynku względem układu drugiego i odwrotnie.
Ten wyżej wymieniony, ciekawy przypadek składania prędkości jest podany w tabeli l pod punktem 1.